ความแตกต่างระหว่าง GPS และ DGPS
เนื้อหา
GPS และ DGPS เป็นระบบนำทางด้วยดาวเทียม ความแตกต่างพื้นฐานระหว่าง GPS และ DGPS นั้นขึ้นอยู่กับความถูกต้อง DGPS นั้นแม่นยำกว่า GPS DGPS ได้รับการออกแบบมาโดยเจตนาเพื่อลดความเสื่อมของสัญญาณ
จีพีเอสให้ความแม่นยำประมาณ 10 เมตร แต่ DGPS สามารถให้ความแม่นยำประมาณ 1 เมตรแม้จะเกิน 10 ซม.
- แผนภูมิเปรียบเทียบ
- คำนิยาม
- ความแตกต่างที่สำคัญ
- ข้อสรุป
แผนภูมิเปรียบเทียบ
| พื้นฐานสำหรับการเปรียบเทียบ | จีพีเอส | DGPS |
|---|---|---|
| จำนวนเครื่องรับที่ใช้ | ตัวรับสัญญาณ GPS แบบสแตนด์อโลนเพียงตัวเดียวเท่านั้น | สองโรเวอร์และเครื่องรับอยู่กับที่ |
| ความถูกต้อง | 15-10 ม | 10 ซม |
| ช่วงของเครื่องมือ | ทั่วโลก | ท้องถิ่น (ภายใน 100 กม.) |
| ราคา | ราคาไม่แพงเมื่อเทียบกับ DGPS | แพง |
| ช่วงความถี่ | 1.1 - 1.5 GHz | แตกต่างกันไปตามหน่วยงาน |
| ปัจจัยที่มีผลต่อความแม่นยำ | ความพร้อมใช้งานที่เลือกได้, เวลาดาวเทียม, สภาพบรรยากาศ, บรรยากาศรอบนอกโลก, troposphere และ multipath | ระยะห่างระหว่างเครื่องส่งสัญญาณและรถแลนด์โรเวอร์, ไอโอโนสเฟียร์, โทรโพสเฟียร์และมัลติพา ธ |
| ระบบพิกัดเวลาที่ใช้ | WGS84 | ระบบพิกัดท้องถิ่น |
ความหมายของ GPS
ระบบกำหนดตำแหน่งบนโลก (GPS) ให้ตำแหน่งที่ถูกต้องของวัตถุไปยังโลก ใช้สัญญาณทันเวลาที่สร้างโดยดาวเทียมที่หมุนรอบโลก จีพีเอสประกอบด้วยกลุ่มของ 24 ดาวเทียมและพิเศษสำหรับการสำรองข้อมูล ใช้ดาวเทียมสี่ดวงเพื่อให้ได้ตำแหน่งที่แม่นยำกระบวนการนี้เรียกว่า trilateration
เทคโนโลยี GPS ใช้ตัวรับแบบสแตนด์อโลนซึ่งมีการคำนวณตำแหน่งโดยตรง เทคนิคนี้มีแนวโน้มที่จะเกิดข้อผิดพลาดเช่นข้อผิดพลาดของนาฬิกาดาวเทียมที่ไม่ถูกต้องแก้ไขข้อผิดพลาดของดาวเทียมพารามิเตอร์วงโคจรล่าช้า ionospheric และ tropospheric, ข้อผิดพลาด multipath ข้อผิดพลาดทางเรขาคณิตและข้อผิดพลาดการเลือกตัวเลข เพื่อลดข้อผิดพลาดเหล่านี้มีการพัฒนาเทคโนโลยีใหม่ GPS สามารถเพิ่มความแม่นยำเล็กน้อยได้ 10-15 เมตร
คำจำกัดความของ DGPS
ระบบตำแหน่งที่แตกต่างกันทั่วโลก (DGPS) เป็นการปรับปรุง GPS เทคโนโลยี DGPS สามารถบรรลุความแม่นยำสูงสุด 10 ซม. ช่วยลดหรือกำจัดความเสื่อมของสัญญาณส่งผลให้ปรับปรุงความแม่นยำ เป้าหมายของระบบ GPS ที่แตกต่างกันจะไม่ไปที่ตำแหน่งนั้นโดยตรง ค่อนข้างจะพบตำแหน่งที่สัมพันธ์กับจุดอ้างอิงคงที่ DGPS อาศัยตัวรับสองตัว rover และตัวรับสัญญาณอ้างอิง rover คือผู้ใช้และตัวรับสัญญาณอ้างอิงนั้นเรียกอีกอย่างว่าตัวรับสัญญาณที่อยู่กับที่
ตัวรับแบบอยู่กับที่ได้รับการแก้ไขและตำแหน่งของมันเป็นที่รู้จักในระบบ ข้อมูลดาวเทียมถูกฉายอย่างต่อเนื่องไปยังรถแลนด์โรเวอร์และหอคอยสถานีฐาน หอสถานีฐานใช้ตำแหน่งที่รู้จักในการคำนวณเวลาที่ถูกต้อง เครื่องรับที่อยู่กับที่จะส่งข้อมูลไปยังตัวรับสัญญาณ rover เพื่อแก้ไขการวัดโดยใช้ตำแหน่งสัมพัทธ์ของเครื่องรับ
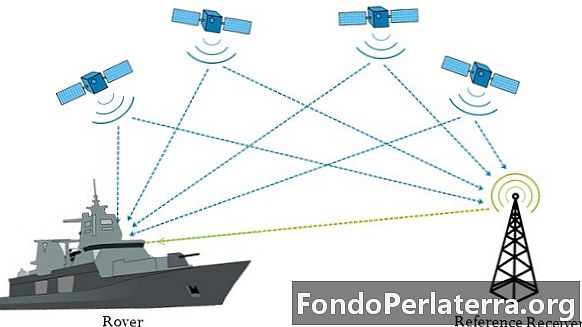
- ใน GPS มีตัวรับแบบสแตนด์อโลนซึ่งรับสัญญาณจากดาวเทียมในขณะที่ DGPS มีตัวรับสัญญาณสองตัวคือตัวรับสัญญาณอ้างอิงและตัวสำรวจ (ผู้ใช้) ที่ตัวสำรวจได้รับสัญญาณที่ปรับเทียบจากตัวรับสัญญาณอ้างอิง (สถานีฐานแบบตายตัว)
- ความแม่นยำของระบบ GPS อยู่ที่ประมาณ 15 เมตร ในทางตรงกันข้าม DGPS นั้นมีความแม่นยำมากขึ้นและสามารถบรรลุความแม่นยำได้สูงถึง 10 ซม.
- เครื่องมือ GPS ครอบคลุมหลากหลายและสามารถใช้ได้ทั่วโลกในขณะที่เครื่องมือ DGPS ครอบคลุมระยะสั้นถึง 100 กม. แต่ช่วงนี้สามารถเปลี่ยนแปลงได้ตามช่วงความถี่
- ระบบ GPS นั้นมีราคาไม่แพงเมื่อเทียบกับระบบ DGPS
- ความถี่สัญญาณที่ส่งโดยดาวเทียมในช่วง GPS อยู่ระหว่าง 1.1 ถึง 1.5 GHz ในทางตรงกันข้ามใน DGPS ดาวเทียมไม่ส่งช่วงความถี่คงที่ความถี่ที่ส่งขึ้นอยู่กับหน่วยงาน
- ปัจจัยที่มีผลต่อความแม่นยำของระบบ GPS ได้แก่ ความพร้อมใช้งานการเลือกเวลาของดาวเทียมสภาพบรรยากาศไอโอโนสเฟียร์โพรพิโอสเฟียร์และมัลติพาท ในทางตรงกันข้ามระบบ DGPS ได้รับผลกระทบจากระยะห่างระหว่างตัวส่งและโรเวอร์, ไอโอโนสเฟียร์, โทรโพสเฟียร์และมัลติพาท แต่ในระดับน้อย
- จีพีเอสใช้ระบบพิกัดเวลา WGS84 ซึ่งเป็นระบบภาคพื้นดินคงที่, พื้นดินเป็นศูนย์กลางและฐานข้อมูลทางภูมิศาสตร์ เมื่อเทียบกับ DGPS ใช้ระบบประสานงานท้องถิ่น
ข้อสรุป
ระบบกำหนดตำแหน่งดิฟเฟอเรนเชียล (DGPS) เป็นเทคโนโลยีที่แม่นยำกว่าระบบจีพีเอสทั่วโลก ความแม่นยำใน DGPS นั้นได้รับการปรับปรุงโดยใช้ตัวรับสัญญาณสองตัวแทนที่จะใช้ตัวรับซึ่งจะค้นหาตำแหน่งที่แม่นยำโดยใช้ตำแหน่งสัมพัทธ์





